 无穷大?
无穷大? 











Pixiv - KiraraShss

交大荣昶杯游记Day1
388 字
2 分钟
交大荣昶杯游记Day1
早上 7:50 起床,在附近的便利店简单吃了一些早餐,然后直接前往菁菁堂参加开幕式。
这是附赠的礼品,里面有一些纪念品。
(菁菁堂)

随后从菁菁堂出来集合,便能看到升旗台和校门。


中午吃了一碗美味😋牛肉面🍜。


路上的涂鸦,上面还有 MC 社的涂鸦,但这里没有拍到。

随后下午就开始正式上课了。


originbot 基础操作
- 上电启动
- ssh远程连接
- 输入命令
ros2 launch originbot_bringup originbot.launch.py再开一个ssh窗口
ros2 run teleop_twist_keyboard teleop_twist_keyboard- 用键盘控制小车运动
网页显示小车摄像头视频
- BGR模式信息量较大,不便于传输,该用NV12编码,将YUV420P转换为NV12编码,然后再进行传输。YUV模型定义了一个亮度分量,表示物理线性空间亮度,以及两个色度分量,分别称为U(蓝色投影)和V(红色投影),表示色度信息。
- 运行小车底盘通讯和启动摄像头。
ros2 launch originbot_bringup camera_internal.launch.py use_camera:=true或只启动摄像头:
ros2 launch originbot_bringup camera_internal.launch.py其他操作:
ros topic listros2 topictopic info /hbmem_imgros2 topic echo /hbmem_img- 运行编码程序
ros2 launch hobot_codec hobot_codec.launch.py图像格式转换成BGR,topic: /image_jpeg
- 运行网页显示程序
ros2 launch websocket websocket.launch.py websocket_only_show_image = true- 打开浏览器,输入网址:http://<小车ip>:8000
综上,三条命令分别是:
ros2 launch originbot_bringup camera_internal.launch.pyros2 launch hobot_codec hobot_codec_encode.launch.pyros2 launch websocket websocket.launch.py websocket_only_show_image:=true

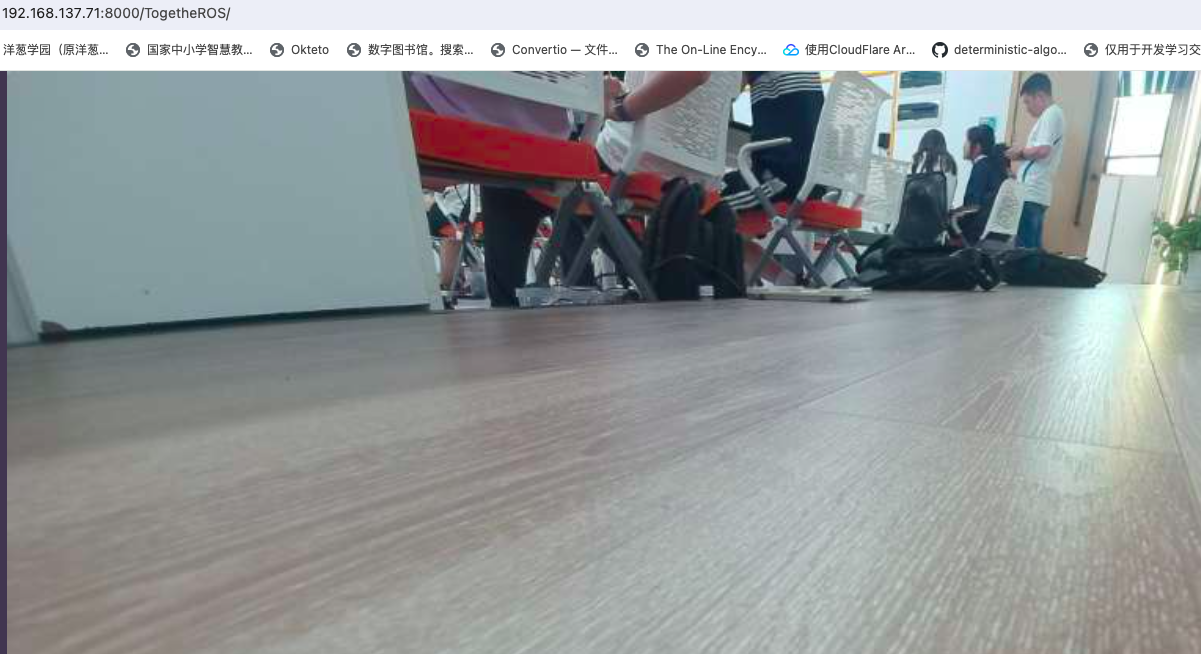
成功显示!
支持与分享
如果这篇文章对你有帮助,欢迎分享给更多人或赞助支持!
相关文章 智能推荐
1
交大荣昶杯游记Day3
展览厅 2024-07-17
2
交大荣昶杯游记Day2
展览厅 2024-07-16
3
交大荣昶杯游记Day0
展览厅 2024-07-14
4
迁站记:自旧域至新域,自 Jekyll 至 Astro
展览厅 记一次博客由旧域迁移至新域,并由 Jekyll 更易为 Astro 之经过与所感。
5
【爽文】万律之主:从AK高考开始。
展览厅 2026-02-13
随机文章 随机推荐
评论区
欢迎来到我的博客!这是一则示例公告。
146
5
271
314,753
0 天
0 天前